Der Einfluss von Kugel- und Rollengewindetrieben im Maschinenbau
Technologische Entwicklung von Kugelgewindetrieben und Planetenrollengewindetrieben
MENU
Der Einfluss von Kugel- und Rollengewindetrieben im Maschinenbau
Technologische Entwicklung von Kugelgewindetrieben und Planetenrollengewindetrieben
Die folgenden Artikel untersuchen Antriebe vom Typ Kugelgewindetrieb und Planetenrollengewindetrieb aus verschiedenen Gesichtspunkten. Es soll Maschinenbauern ein Gefühl für die Bedeutung der Gesamtoptimierung in einem Antriebssystem vermitteln.

Die zunehmende Komplexität der Technologie, die Digitalisierung und Umweltbelange stellen an Maschinenbauer höhere Anforderungen als je zuvor.
Bei solchen Anforderungen kann man dazu verleitet werden, ein mechanisches Antriebssystem teilweise zu optimieren, indem man sich auf eine bestimmte Eigenschaft konzentriert und dabei die intrinsischen Vorteile wie Einfachheit, Zuverlässigkeit, Sicherheit, Wartungsfreundlichkeit, Störungsvisualisierung usw. vernachlässigt.
Die folgenden Artikel untersuchen Antriebe vom Typ Kugelgewindetrieb und Planetenrollengewindetrieb aus verschiedenen Gesichtspunkten. Es soll Maschinenbauern ein Gefühl für die Bedeutung der Gesamtoptimierung in einem Antriebssystem vermitteln. Die Gesamtoptimierung führt zur Maximierung des Kundenmehrwerts, der die Essenz der Konstruktionsaktivität sein sollte.
Wie in Abbildung 1 dargestellt, nutzt ein Kugelgewindetrieb die Rollbewegung von Kugeln auf der Oberfläche eines Gewindetriebs, um eine Relativbewegung zu erzeugen.
Das heißt, Kugeln, die sich zwischen einer Welle (innerer Gewindetrieb) und einer Mutter (äußerer Gewindetrieb) befinden, wandeln die Gleitkontaktbewegung an den Gewindeoberflächen in eine Rollkontaktbewegung um. Die Hauptfunktion eines Kugelgewindetriebs ist die Umwandlung einer Drehbewegung in eine Linearbewegung und umgekehrt.
Ein Planetenrollengewindetrieb weist Rollen auf der Mutterseite, wie in Abbildung 2 dargestellt, oder auf der Wellenseite, wie in Abbildung 3 dargestellt, auf. Die Gewinderollen sind zwischen einer Welle (innerer Gewindetrieb) und einer Mutter (äußerer Gewindetrieb) angeordnet und bieten mehr Kontaktpunkte als Kugeln. Wie bei einem Kugelgewindetrieb ist die Hauptfunktion eines Planetenrollengewindetriebs die Umwandlung zwischen Drehbewegung und Linearbewegung. Aufgrund dieses Konstruktionsunterschieds eignen sich Kugelgewindetriebe in erster Linie für Antriebsmechanismen, bei denen die Laufruhe (Wirkungsgrad) im Vordergrund steht, während Planetenrollengewindetriebe sich für hohe Belastbarkeit, lange Lebensdauer und hohe Drehzahlen eignen.
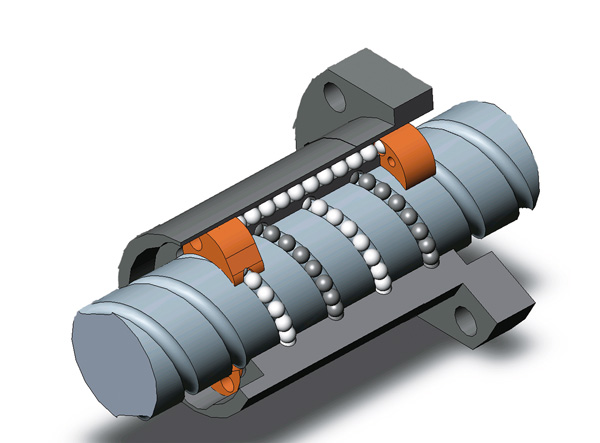
Abbildung 1: Mechanismus eines Kugelgewindetriebs
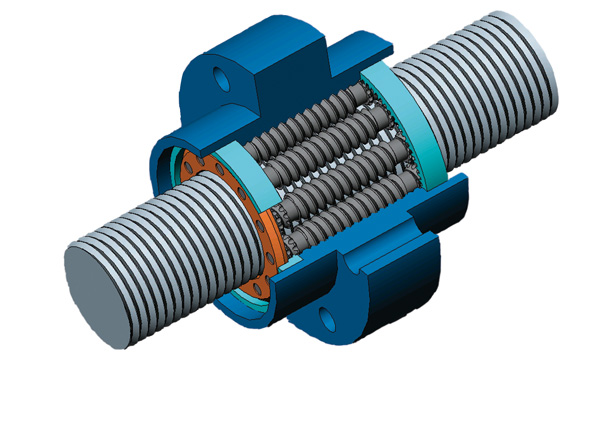
Abbildung 2: Mechanismus eines Planetenrollengewindetriebs
Abbildung 2: Mechanismus eines Planetenrollengewindetriebs
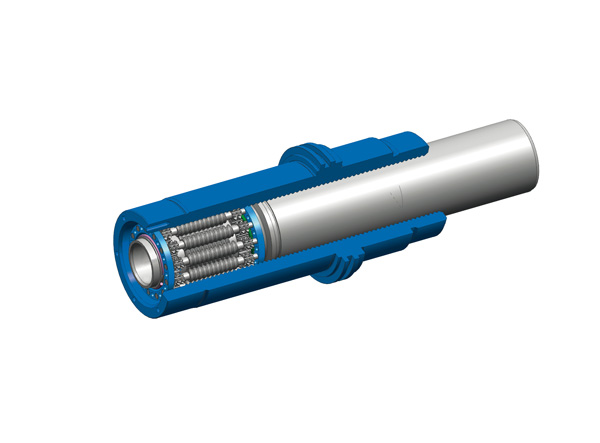
Abbildung 3: Mechanismus eines Planetenrollengewindetriebs mit Rollenrückführung
Inhaltsverzeichnis
THEMA EINS
ANTRIEBSTECHNIK DER HOCHGESCHWINDIGKEITSBAHN
Bahnanwendungen gelten im Allgemeinen als technologisch weit hinter der führenden Antriebstechnik zurück geblieben. Es gibt jedoch Ausnahmen, wie zum Beispiel der Shinkansen der Serie E5 in Japan, der eine Höchstgeschwindigkeit von 320 km/h erreicht. Dieser Zug ist für seinen ausgezeichneten Fahrkomfort bekannt.
Erfahren Sie mehr über die Bahntechnik
THEMA ZWEI
GESCHICHTE UND VORTEILE VON KUGELGEWINDETRIEBEN UND PLANETENROLLENGEWINDETRIEBEN
Kugelgewindetriebe wurden zuerst als linearer Bewegungsvorschubmechanismus für Pressmaschinen entwickelt. Solche Gewinde finden sich sowohl in einem 1874 angemeldeten US-Patent als auch in einem 1879 angemeldeten deutschen Patent.
Erfahren Sie mehr über Kugel-/Planetenrollengewindetriebe
THEMA DREI
TECHNOLOGISCHE ENTWICKLUNG DER KUGELGEWINDETRIEBE- UND PLANETENROLLENGEWINDETRIEBE
Stellt man den „Nutzen“ eines sich entwickelnden Systems als Funktion der Zeit dar, erhält man im Allgemeinen eine gut definierte S-Kurve. Diese Kurve ist eine Darstellung eines Systems in zwei Dimensionen. Dabei stellt die horizontale Achse die technologische Entwicklung des Systems (Zeit) und die vertikale Achse die Systemleistung (Idealität) dar.
THEMA VIER
POSITIONIERUNG VON KUGELGEWINDE- UND PLANETENROLLENGEWINDETRIEBEN
Ein Vergleich von Trapezgewindetrieb, Kugelgewindetrieb und Planetenrollengewindetrieb als Systeme ohne Berücksichtigung spezifischer Anwendungsanforderungen. Grundlage für die Ergebnisse sind die Erfahrungen von Moog bei der Konstruktion von Antrieben und die von anderen Herstellern bereitgestellten Daten.
Erfahren Sie mehr über Kugel-/Planetenrollengewindetriebe
