MENU
The Impact of Ball and Roller Screws in Machine Design
Technological Evolution of Ball Screws and Planetary Roller Screws
The following articles examine ball screw and planetary roller screw type actuators from a variety of viewpoints. It is intended to provide machine designers with a sense of the importance of total optimization in an actuation system.

Increased complexity of technology, digitalization, and environmental concerns are placing heavier demands on machine designers than ever before.
In the face of such pressures, one can be tempted to partially optimize a mechanical actuation system by focusing on a particular characteristic, at the expense of intrinsic benefits such as simplicity, reliability, safety, ease of maintenance, trouble visualization, etc.
The following articles examine ball screw and planetary roller screw type actuators from a variety of viewpoints. It is intended to provide machine designers with a sense of the importance of total optimization in an actuation system. Total optimization infers maximization of customer value, which should be the essence of design activity.
As shown in Figure 1, a ball screw uses the rolling motion of balls on the surface of a lead screw to produce relative motion. In other words, balls positioned between a shaft (inner screw) and nut (outer screw) convert the sliding contact motion at the screw surfaces into rolling contact motion. The main function of a ball screw is to convert rotary motion into linear motion and vice versa.
A planetary roller screw has rollers on the nut side as shown in Figure 2, or on the shaft side as shown in Figure 3. The threaded rollers are placed between a shaft (inner screw) and nut (outer screw), providing more contact points than balls. As with a ball screw, the main function of a planetary roller screw is conversion between rotary motion and linear motion. This structural difference makes ball screws primarily suitable for drive mechanisms that give priority to smoothness (efficiency), whereas planetary roller screws are suitable when high load capacity, long service life, and high speed are required.
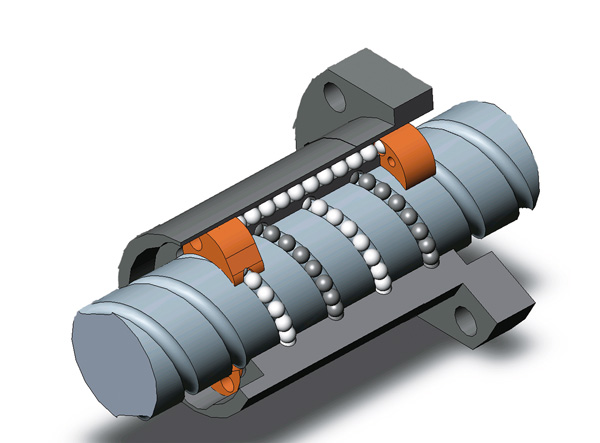
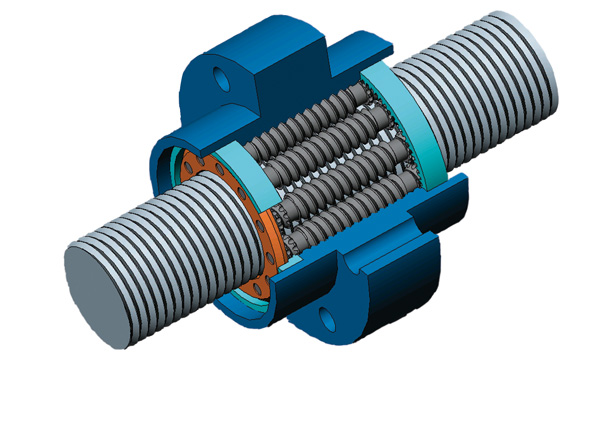
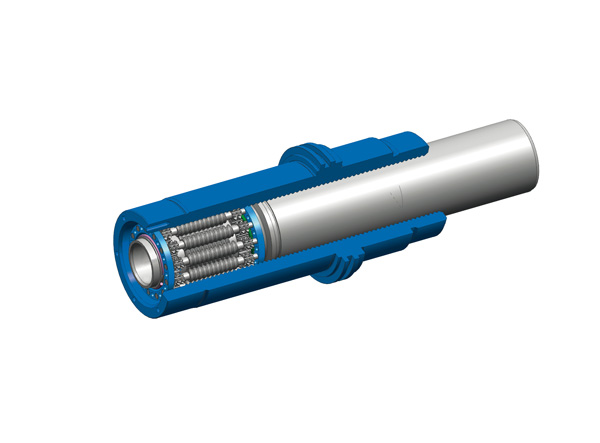
Table of Contents
TOPIC ONE
HIGH SPEED RAIL ACTUATION TECHNOLOGY
Rail applications are generally regarded as being far behind the leading edge of actuation technology. However, there are exceptions, such as the E5 Series Shinkansen in Japan, which operates at a maximum speed of 320 km/h. This train is known for its excellent ride comfort.
TOPIC TWO
HISTORY AND BENEFITS OF BALL SCREWS AND PLANETARY ROLLER SCREWS
Ball screws were first devised as a linear motion feeding mechanism for press machines. Such screws can be found in a U.S. patent filed in 1874, as well as in a German patent filed in 1879.
TOPIC THREE
EVOLUTION OF BALL SCREW AND PLANETARY ROLLER SCREW TECHNOLOGY
If you plot the "benefits" of an evolving system as a function of time, you generally obtain a well-defined S-curve. This curve is a representation of a system in two dimensions, where the horizontal axis represents technological evolution of the system (time) and the vertical axis represents system performance (ideality).
TOPIC FOUR
POSITIONING OF BALL SCREW AND PLANETARY ROLLER SCREW ACTUATORS
A comparison of Acme screw, ball screw, and planetary roller screw actuators as systems without taking into consideration specific application requirements. Outcomes are derived from Moog’s actuation design experience and data provided by other manufacturers.
